
L298N モータードライバーのデータシート | HブリッジArduino
- 出力構成: ハーフブリッジ(4)
- 用途: DCモーター、リレー、ソレノイド、ステッピングモーター
- インタフェース: 論理
- パッケージ: マルチワット-15(垂直、曲げ、千鳥配線)


HK$250.00以上のご注文で送料無料

迅速な対応、迅速な見積もり

すぐに発送、アフターサービスも安心

オリジナルチャネル、本物の製品の保証
L298N
L298Nは、特にロボット製作や自動化プロジェクトに携わっている方にとって、非常に便利なモータードライバです。2つのDCモーターを同時に制御することも、1つのバイポーラステッピングモーターを制御することもできます。このドライバの優れた点の一つは、広い電圧範囲です。4.5Vから46Vまで動作させることができ、ほとんどの趣味のニーズに対応します。
各チャンネルは最大2Aの連続電流(ピーク時3A)を快適に供給できるため、やや大きめのモーターにも十分な電力を供給できます。L298Nの優れた点は、過熱と短絡に対する保護機能が内蔵されていることです。これにより、システムの損傷を防ぐことができます。さらに、TTLとCMOSロジックの両方に対応しているため、ArduinoやRaspberry Piなどのマイクロコントローラーとの接続も非常に簡単です。
PWM サポートにより、モーターの速度と方向を正確に制御できるため、詳細なプロジェクトに最適です。
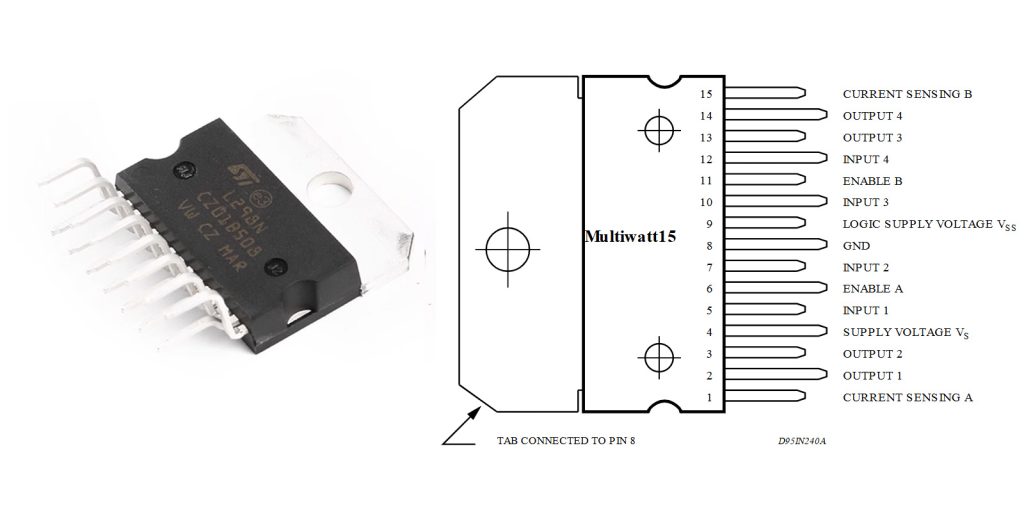
L298N ピン配置

L298N モーター ドライバー IC のピン配置を表でわかりやすく示します。
| ピン番号 | ピン名 | 説明/機能 |
|---|---|---|
| 1 | 電流センスA | チャネルA電流検出 |
| 2 | 出力1 | チャンネルA出力(モーター端子) |
| 3 | 出力2 | チャンネルA出力(モーター端子) |
| 4 | 対 | モーター供給電圧(4.5~46V) |
| 5 | 入力1 | 出力1のロジック入力 |
| 6 | Aを有効にする | チャネルAのイネーブルピン(PWM速度制御) |
| 7 | 入力2 | 出力2のロジック入力 |
| 8 | GND | 地面 |
| 9 | 対 | ロジック電源電圧(+5V標準) |
| 10 | 入力3 | 出力3のロジック入力 |
| 11 | Bを有効にする | チャネル B のピンを有効にする (PWM 速度制御) |
| 12 | 入力4 | 出力4のロジック入力 |
| 13 | 出力3 | チャンネルB出力(モーター端子) |
| 14 | 出力4 | チャンネルB出力(モーター端子) |
| 15 | 電流センスB | チャネルB電流検出 |
ピン配列の使用法と注意事項:
L298Nモータードライバを設定する際は、モーター電源(Vs)が推奨電圧範囲(4.5V~46V)内に収まっていることを確認してください。通常、ロジック電源(Vss)は5V前後で安定したパフォーマンスを発揮します。モーター速度を正確に制御する必要がある場合は、PWM信号でEnableピン(Enable A/B)を使用すると、より正確な制御が可能になります。
セットアップは必ず適切に接地し、出力のショートには十分注意してください。ショートはICに深刻な損傷を与える可能性があります。また、電流使用量にも注意してください。ドライバを最大限まで使用している場合は、ヒートシンクなどの冷却手段を使用してください。そうすることで、過熱を防ぎ、チップの寿命を延ばすことができます。
L298N相当



L298N 相当のピン配置
以下は、L298N と、同一または類似のパッケージの同等のモーター ドライバー IC を比較した表です。
| パラメータ | L298N | L293D | SN754410 | VNH2SP30 |
|---|---|---|---|---|
| 供給電圧(Vs) | 4.5~46V | 4.5~36V | 4.5~36V | 5.5~16V |
| 連続電流 | チャネルあたり2A | チャネルあたり0.6 A | チャネルあたり1A | 14 A(ピーク30 A) |
| ピーク電流 | 3A | 1.2A | 2A | 30 A(短時間バースト) |
| パッケージタイプ | マルチワット-15、PowerSO20 | DIP-16、SOIC-16 | DIP-16、SOIC-16 | マルチパワーSO-30 |
| 熱保護 | はい | はい | はい | はい |
| 内部ダイオード | いいえ(外部ダイオードが必要) | はい | はい | MOSFET内蔵(ダイオード不要) |
| ロジック入力電圧 | TTL、CMOS(5V対応) | TTL、CMOS(5V対応) | TTL、CMOS(5V対応) | CMOS(3.3Vまたは5V互換) |
L298Nモータードライバの代替品をお探しの際は、必ずご自身の電圧と電流のニーズを満たすものを選んでください。L293DやSN754410などは似ているように見えるかもしれませんが、対応電流が低く、電圧範囲が狭い点にご注意ください。強力なモーターを動作させる場合は、VNH2SP30などの製品を検討してください。高電流対応でMOSFETを内蔵しており、外付けダイオードは不要です。最も重要なのは、代替品が既存のロジック構成と互換性があり、耐熱性が高いことを必ず確認することです。これにより、モーターがスムーズかつ安全に動作し、過熱の問題を回避できます。
l298n モータードライバー Arduino & l298n 配線図


L298N モーター ドライバーを Arduino Mega に簡単に接続して使用する方法は次のとおりです。
5VのUSBパワーバンクですべての電源を供給します。Arduino MegaのUSBポートに接続し、L298Nの12V入力にも5Vを供給します(ただし、モーターが十分な電力でスムーズに動作するように、通常はより高い電圧を選択します)。
2つのDCモーターをL298Nの出力(OUT1~OUT4)に接続し、独立して制御します。Arduinoのピン(2~5、8~11など)をL298Nの入力ピンとイネーブルピン(IN1~IN4、ENA、ENB)に接続します。PWM信号で各モーターの速度と方向を調整できます。安定性を確保するため、両方のグランド(ArduinoとL298N)が接続されていることを確認してください。
l298nデュアルHブリッジ
L298NデュアルHブリッジの概要:
モーターを使ったプロジェクトを組むなら、L298Nモータードライバーが非常に便利です。2つのDCモーターを同時に、あるいはステッピングモーターでさえも簡単に制御できます。このドライバーが便利な理由の一つは、その耐久性の高さです。長時間の使用にも問題なく耐えられます。さらに、ArduinoやRaspberry Piなどのマイクロコントローラーへの接続も簡単なので、ロボット工学やオートメーションプロジェクトのセットアップが格段に楽になります。
動作原理:
Hブリッジ構成は、DCモーターを双方向に制御するシンプルで効果的な方法です。基本的に、モーター端子の電圧極性を切り替えることで、モーターを正転、逆転、または完全に停止させることができます。また、イネーブルピンにPWM信号を使用すれば、速度を正確に制御できるため、プロジェクトに合わせてモーターの回転速度を微調整できます。
l298n と l293d

詳細な比較はこちら L298N そして L293D モーター ドライバー IC の重要なパラメータを強調表示します。
| パラメータ | L298N | L293D |
|---|---|---|
| 供給電圧(Vs) | 4.5V~46V | 4.5V~36V |
| 出力電流(連続) | チャネルあたり2A | チャネルあたり0.6A |
| ピーク電流 | チャネルあたり3A | チャネルあたり1.2A |
| 動作温度 | -25℃~130℃ | -40℃~85℃ |
| パッケージタイプ | マルチワット-15、PowerSO20 | DIP-16、SOIC-16 |
| ロジック入力電圧 | TTL、CMOS互換 | TTL、CMOS互換 |
| 熱保護 | はい(サーマルシャットダウン) | はい(サーマルシャットダウン) |
| 内部ダイオード | いいえ(外部ダイオードが必要) | はい(フライバック用ダイオード内蔵) |
| PWM制御 | はい(モーター速度制御用) | はい(モーター速度制御用) |
| 料金 | 通常は高い | 通常は低い |
| 使用事例 | 高電流アプリケーション | 低~中電流アプリケーション |
交換の概要と注意事項:
高出力プロジェクトに取り組んでいるなら、L298Nが最適なドライバです。高電圧(最大46V)と高電流(チャンネルあたり2A、ピーク3A)に対応しているため、より大きな出力とトルクを必要とする大型モーターに最適です。ただし、フライバック保護用のダイオードは内蔵されていないため、モーター保護のために外付けダイオードを追加する必要があります。
一方、L293Dは小型モーターや軽負荷に適しています。低電圧(最大36V)と低電流(チャネルあたり0.6A)をサポートします。さらに、フライバック保護用のダイオードを内蔵しているため、モーターの安全性を確保するために追加部品を追加する必要がありません。
これら2つのモデルを切り替える際は、電圧と電流がニーズに合っていることを確認してください。高出力モーターを使用する場合はL298Nを、小規模で低出力のプロジェクトの場合はL293Dを選択するとコストを節約できます。
l298nをラズベリーパイに接続する方法
L298N モーター ドライバーを Raspberry Pi で動作させるには、次の簡単な手順に従ってください。
-
電源:
• L298Nの12V+(Vs)ピンを外部電源に接続します。
• L298N の GND を Raspberry Pi と外部電源の両方の GND に接続してください。 -
モーター接続:
• OUT1とOUT2をモーター1の端子に接続します。
• OUT3とOUT4をモーター2に接続します。 -
GPIO 接続:
• モーター 1 の IN1 と IN2 を Raspberry Pi の GPIO ピン (GPIO17 や GPIO27 など) に接続します。
• モーター 2 の場合、IN3 と IN4 を GPIO ピン (たとえば、GPIO22 と GPIO23) に接続します。
• 一定の電力を得るために ENA と ENB を 5V に接続するか、PWM 速度制御のために GPIO ピンを使用します。 -
モーターの方向を制御する:
モーターの方向 (前進または後進) を設定するには、GPIO.output(IN1, GPIO.HIGH) などのコマンドを含む Python GPIO ライブラリを使用します。
l298nステッピングモーター制御
L298Nモータードライバは、特にロボット工学やオートメーションプロジェクトにおいて、ステッピングモーターの制御に広く使用されています。その動作を簡単に説明します。
-
モーター接続: ステッピングモーターには通常4本のワイヤーがあり、L298Nの出力端子(OUT1、OUT2、OUT3、OUT4)に接続します。これらの接続によってステッピングモーターの回転を制御します。
-
制御信号: L298Nには、各モーターコイル用に2つの入力ピン(IN1、IN2、IN3、IN4)があります。これらのピンにHIGH信号とLOW信号の異なる組み合わせを送信することで、モーターの方向とステップを制御し、正確に動かすことができます。
-
速度制御用のPWM: L298Nには、PWM信号を使ってモーターの回転速度を制御できるイネーブルピン(ENA、ENB)も搭載されています。PWM信号のデューティサイクルを調整することで、モーターの速度を制御できます。
-
電源: ステッピング モーターには外部電源 (通常 12V) が必要ですが、L298N ロジック側は 5V で動作し、Arduino またはその他のマイクロコントローラから電力を供給できます。
l298nの仕組み
L298Nは基本的にデュアルHブリッジモータードライバーで、モーター、特にDCモーターやステッピングモーターを制御する際に非常に便利です。内部に2つの独立したHブリッジ回路があり、それぞれが1つのモーターを駆動できると考えてください。通常は、Arduinoなどのマイクロコントローラーに接続し、そこからの信号を使って速度(PWMを使用)と方向(Hブリッジへの入力信号を変更することで)を設定します。また、モーター専用の電源ピンとグランドピンも備えているため、マイクロコントローラーに負担をかけることなくモーターに十分な電力を供給できます。このチップは、モーターの取り扱いが非常に簡単なため、DIYロボット工学やオートメーションプロジェクトでよく使用されます。
同様のもの

74HCT08PW
ネクスペリア

74AHC1G02GV
ネクスペリア

CD4081BF3A
テキサス・インスツルメンツ
74AHCT1G00GW
ネクスペリア
74AHCT1G08GW
ネクスペリア
TC4001BP
東芝
CD4011BF3A
テキサス・インスツルメンツ
74AHCT14PW
ネクスペリア
TC7S02FU
東芝

74LVC00AD
ネクスペリア
74HC10D
ネクスペリア
74AHCT541PW
ネクスペリア
カートに追加する

GAL16V8D-15LPI
ラティスセミコンダクター株式会社

ADP1741ACPZ-R7
アナログ・デバイセズ株式会社

VSC8502XML-03
マイクロチップテクノロジー

ATSAM3A4CA-AU
マイクロチップテクノロジー

MP6922DSE-LF-Z
モノリシックパワーシステムズ株式会社
BCM53333A0IFSBLG
ブロードコム・リミテッド

DP83848JSQ/NOPB
ナショナルセミコンダクター

TPS62742DSSR
テキサス・インスツルメンツ

LMH6643MMX/NOPB
テキサス・インスツルメンツ

A5973ADTR
STマイクロエレクトロニクス

DAC082S085CIMMX/NOPB
テキサス・インスツルメンツ

SN74HCT244DWR
テキサス・インスツルメンツ
関連製品
74HCT08PW
ネクスペリア
74AHC1G02GV
ネクスペリア
CD4081BF3A
テキサス・インスツルメンツ
74AHCT1G00GW
ネクスペリア
74AHCT1G08GW
ネクスペリア
TC4001BP
東芝
CD4011BF3A
テキサス・インスツルメンツ
74AHCT14PW
ネクスペリア
TC7S02FU
東芝
74LVC00AD
ネクスペリア
74HC10D
ネクスペリア
74AHCT541PW
ネクスペリア
74HC132PW
ネクスペリア
74HC1G04GV
ネクスペリア
74AHC1G04GW
ネクスペリア
74AHC1GU04GW
ネクスペリア
74HC27D
ネクスペリア
TC7S00FU
東芝
74LVC00APW
ネクスペリア
74HCT86D
ネクスペリア
74LVC1G11GW
ネクスペリア
HEF4071BT
ネクスペリア

74LVC1G02GV
ネクスペリア
HEF4070BT
ネクスペリア

MC14093BCP
オンセミ
74HC32PW
ネクスペリア
74HC1G08GW
ネクスペリア
74AHC00D
ネクスペリア
74LVC1G86GW
ネクスペリア

HEF4093BP
NXPセミコンダクターズ
RFQ をお送りください。すぐに対応させていただきます。
